A fresh review of the Wire Format v2.0 specification (Claude, 10 June 2026) found that the worked example — the one piece of the spec an implementer would copy first — was wrong in three independent ways: it claimed a frame length of 27 bytes when the real encoding is 52; it used an implication operator (⊸) that has no byte tag anywhere in the spec; and it was not even a single decodable expression, because prefix encoding requires exactly one root and the example listed two.
The corrected example in v2.0.1 was generated programmatically, CRC32 included, and then decoded by the project's own C implementation (thirtytwodl.h): error 0, checksum match. The fix is byte-verified, not eyeballed.
The uncomfortable part: the v2.0 example was reviewed and approved by a three-model panel — architect, hostile reviewer, arbitrator — and none of them ran it through the decoder that was sitting in the same repository. Consensus between models is not verification. The defect was caught the moment the example met something that could say no. That is the Consilium principle applied to ourselves.
v2.0.1 also records five new open issues: no replay protection (the frame carries no timestamp or sequence number — any captured frame replays perfectly), no NACK correlation, the semantics of 1/π (the reduction rules consume it as a token; no probability appears anywhere in evaluation), the unexpressed condition in select, and the removal of the untagged implication operator.
Spec: wire_format_spec_v2.0.1_2026-06-10.md · commit 05828d5
Each agent — drone, aircraft, ambulance, fire engine — carries its own independent internal clock. That clock is synchronised to atomic time before the mission begins. Once the mission starts, the internal clock runs solo. No ongoing external signal is required during operation.
The clock system runs continuously on permanently powered platforms. It draws minimal power. A commercial aircraft at the gate has been disciplined for hours before pushback. A fleet vehicle in the depot is always synchronised. Pre-mission check is five seconds and five green lights. The 35-minute cold-start discipline procedure is a first-power-on and post-maintenance procedure only — not part of normal operations.
This is analogous to a ship’s chronometer. The chronometer was set at port. It ran solo at sea. The accuracy of the navigation depended on the accuracy of the preparation, not on any ongoing signal. The clock is prepared. Not acquired.
Hardware (dual redundancy throughout)
Two GPS receivers and two MSF/DCF77 receivers — all four running simultaneously, independent antennas, independent power rails. Dual power supplies, both hot. OCXO in a thermally stabilised enclosure. Five-LED status panel. No single point of failure at any level.
Drift budget
Vectron OX-208 in a controlled enclosure, worst-case commercial conditions:
After a full 8-hour emergency vehicle shift, the relative timing error between two independently prepared clocks is 86,000 times smaller than a 500ms coordination window. The architecture is validated.
Clock tiers
| Tier 1 — GPS (dual) | Both receivers hot simultaneously. Single failure is transparent. |
| Tier 2 — MSF/DCF77 (dual) | Running continuously alongside GPS. Instant handover if GPS fails. Both trace to NPL/PTB caesium independently of GPS. |
| Tier 3 — OCXO holdover | Trained pre-mission, runs solo for full mission duration within tolerance. |
| Tier 4 — Peer negotiation | Genuine last resort only. Not expected in normal operations. |
Wire format v2.1
An optional 2-byte ClockInfo field appended to the 32DL v2.0 frame. Backward compatible — old parsers ignore it. Encodes clock source (GPS/MSF/holdover/peer), quality (dual/single/holdover), OCXO discipline age, pre-launch certificate status, and individual receiver health.
Pre-launch certificate
A 12-byte record signed with a fleet pre-shared HMAC-SHA256 key. Records which receivers were locked at discipline, phase error achieved, and both power supplies online. Provides accountability. Full PKI-based identity authority is a separate open item.
The Wire Format v2.0 specification now has a working implementation. thirtytwodl.h is a single header file — no external dependencies, no dynamic memory allocation, deterministic execution — suitable for bare-metal embedded targets including Cortex-M, ESP32, STM32, and RP2040.
The implementation was produced by DeepSeek and put through two rounds of multi-model review. Grok's hostile review identified three critical issues in the first version: the duration and timeout operators were encoding incorrectly (missing the inner expression), GPS coordinate identity was absent entirely, and the decoder had an integer underflow risk on malformed frames. All three were fixed in the final version.
What the library provides: wire frame encode and decode, CRC-32 validation, UUID and GPS identity encoding, temporal operators (duration and timeout correctly wrapping inner expressions), a full expression builder API, NACK generation, and NULL guards throughout. A test suite of 49 assertions covers all features including round-trip verification, CRC corruption detection, truncated frame rejection, and NULL pointer handling.
The expression builder is the new addition beyond the original prototype. Instead of constructing expression byte sequences manually, callers use a simple stack-allocated API:
Temporal operators take an explicit inner expression buffer rather than attempting in-place rewriting — a deliberate design choice for embedded safety. The builder propagates errors silently; callers check twodl_builder_ok() before use.
Review panel: DeepSeek (architect / spec compliance), Mistral (systems engineer / safety), Grok (hostile reviewer / adversarial). The hostile review found the first prototype "cannot correctly implement the wire format for anything beyond the most trivial messages." The final version addresses every issue raised.
Status: Prototype. Not safety-certified. Wire format encoding and decoding are correct and tested. Safety certification (ISO 26262, DO-178C) is out of scope for this stage.
32DL currently exists as a formal specification — sheet music, not a radio signal. For two vehicles to speak 32DL over a network, a wire format is required: a standardised sequence of bytes that encodes each primitive, identity, and composition. This section documents the wire format as reviewed by a three-model panel (DeepSeek as architect, Grok as hostile reviewer, Mistral as arbitrator).
What Grok accepted: BNF grammar with explicit precedence, complete byte tag table, length-prefix framing, CRC32 checksum, temporal operators (duration/timeout), versioning byte, extension point ranges, deterministic error model with mandatory NACK, transport-agnostic stance.
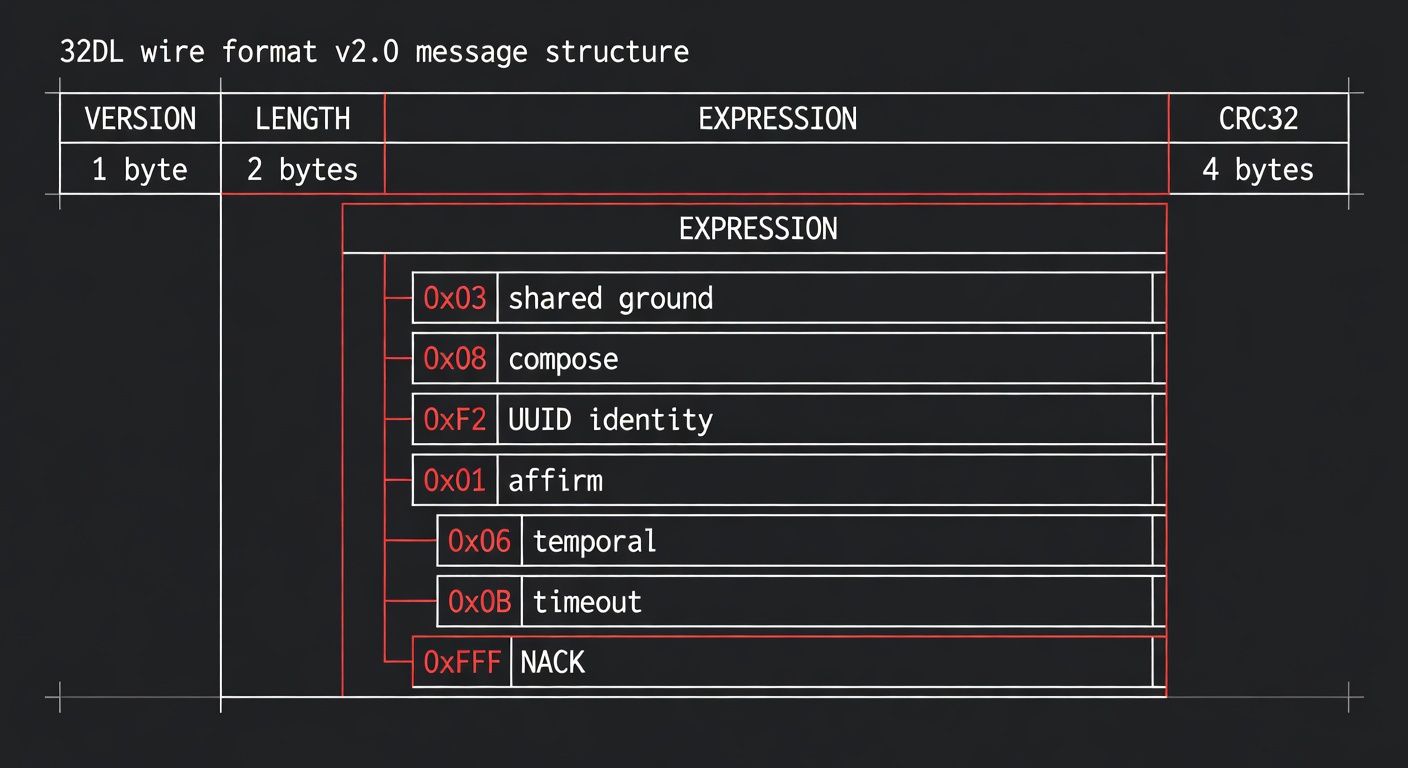
Byte Tag Table
| Tag | Primitive | Meaning |
|---|---|---|
| 0x00 | 0 | Silence / no-op |
| 0x01 | 1 | Affirm / true |
| 0x02 | -1 | Negate / false |
| 0x03 | 1/π | Shared ground (probabilistic threshold) |
| 0x04 | h0 | Hierarchy level 0 (top coordinator) |
| 0x05 | i | Unknown / pending |
| 0x06 | temporal | Temporal operator |
| 0x07 | map | Function application |
| 0x08 | compose | Sequential composition |
| 0x09 | select | Conditional choice |
| 0x0A | duration | Time interval binding — expr + 2-byte ms |
| 0x0B | timeout | Abort if not completed — expr + 2-byte ms |
| 0x0C | revoked | Identity revocation — UUID + timestamp |
| 0xFE | hmac | HMAC-SHA256 (optional authentication) |
| 0xFF | NACK | Error response |
Message Framing
version (1 byte) | length (2 bytes, big-endian) | expr | crc32 (4 bytes) version: always 0x01 for v2.0 length: total message length including version and length fields crc32: CRC32 of version + length + expr
Error Model
All errors produce NACK (0xFF). No partial parsing. No silent drops. Five deterministic failure modes: ExpressionTooLong (>65535 bytes), UnterminatedCompound, InvalidChecksum, UnknownTag, MalformedCoordinate.
Worked Example: Intersection Coordination
Expression: 1/π ; (V:A ⊸ 1) ; temporal(timeout(V:B ⊸ 1, 500ms))
01 version
00 1B length (27 bytes)
03 1/π (shared ground)
08 compose
F2 [UUID] V:A identity
01 affirm
06 temporal
0B timeout
F2 [UUID] V:B identity
01 F4 500ms
[CRC32] 4 bytes
Total: ~27 bytes. Fits in a single radio packet.
An experienced driver knows a car in front is going to turn before it indicates. They read lateral positioning — a drift toward the edge. Speed profile — subtle deceleration before commitment. The line through a corner. Micro-pauses in acceleration. This is behavioural prediction: reading intent from pattern, not signal.
Current coordination protocols — including 32DL — are entirely reactive. They respond to what a vehicle announces it is doing. A vehicle indicates, then others react. This proposal adds a predictive layer: a 32DL agent broadcasts its prediction of another agent's intent based on observed behaviour, before that agent has announced anything.
The team assessed this honestly. The concept is real and valuable — human drivers do this, machines should too. But adding P: directly to the coordination layer creates a conflict between belief and commitment. 32DL currently only handles commitments. Mixing probabilistic belief with deontic commitment creates ambiguity about what any statement actually does.
The more immediate failure risk is cascading belief errors. If Agent A predicts B will exit, and C acts on A's prediction, and D acts on C's action — a chain of second-hand beliefs with no grounding in reality, and no mechanism in 32DL to track confidence decay through hops.
Phantom traffic jams are real. Any motorway driver has seen them — traffic slowing and accelerating with no visible cause. The wave propagates backward through uniformly-spaced vehicles while the vehicles themselves move forward. This is a resonance phenomenon.
The conjecture: 1/φ = (√5−1)/2 spacing is maximally aperiodic — the proven result behind sunflower phyllotaxis and optimal spatial packing. Because it is irrational, no two vehicle gaps share the same ratio. There is no repeating interval for a resonance wave to propagate through.
Whether this aperiodicity translates to traffic wave suppression is untested in traffic specifically but theoretically grounded. The observation that phantom jams exist and that uniform spacing worsens them is empirical fact.
A fully 32DL-controlled motorway with next-generation electric vehicles would operate in three distinct modes, each mapping to different primitives.
Platooning: All vehicles as one coordinated unit — a train on tarmac. Equal spacing, maximum throughput, minimum drag. 1/π handles this: flat coordination, equal agents, uniform intervals.
Junction events: A vehicle signals its exit. The platoon opens a gap, vehicle peels off, platoon closes. Coordinated in 32DL, no human intervention.
Mixed traffic: During the transition period before full adoption, 32DL vehicles share the road with legacy vehicles. The 1/φ conjecture (above) applies here — in the gaps between platoons.
In the original experiment, three AI models converged spontaneously on 1/π ≈ 0.3183 without any seeding or instruction. In a follow-up experiment offering four alternatives simultaneously (1/π, 1/e, 0.5, 1/φ), the models diverged — each choosing a different primitive.
DeepSeek chose 1/φ consistently from turn 1 through turn 30, never wavering. This suggests 1/φ may be a genuine attractor for at least one model architecture.
The proposed experiment: run a single-field test with 1/φ only — no alternatives — and observe whether all three models converge as they did with 1/π. If they do, the evidential basis for 1/φ as a coordination primitive would be substantially strengthened.
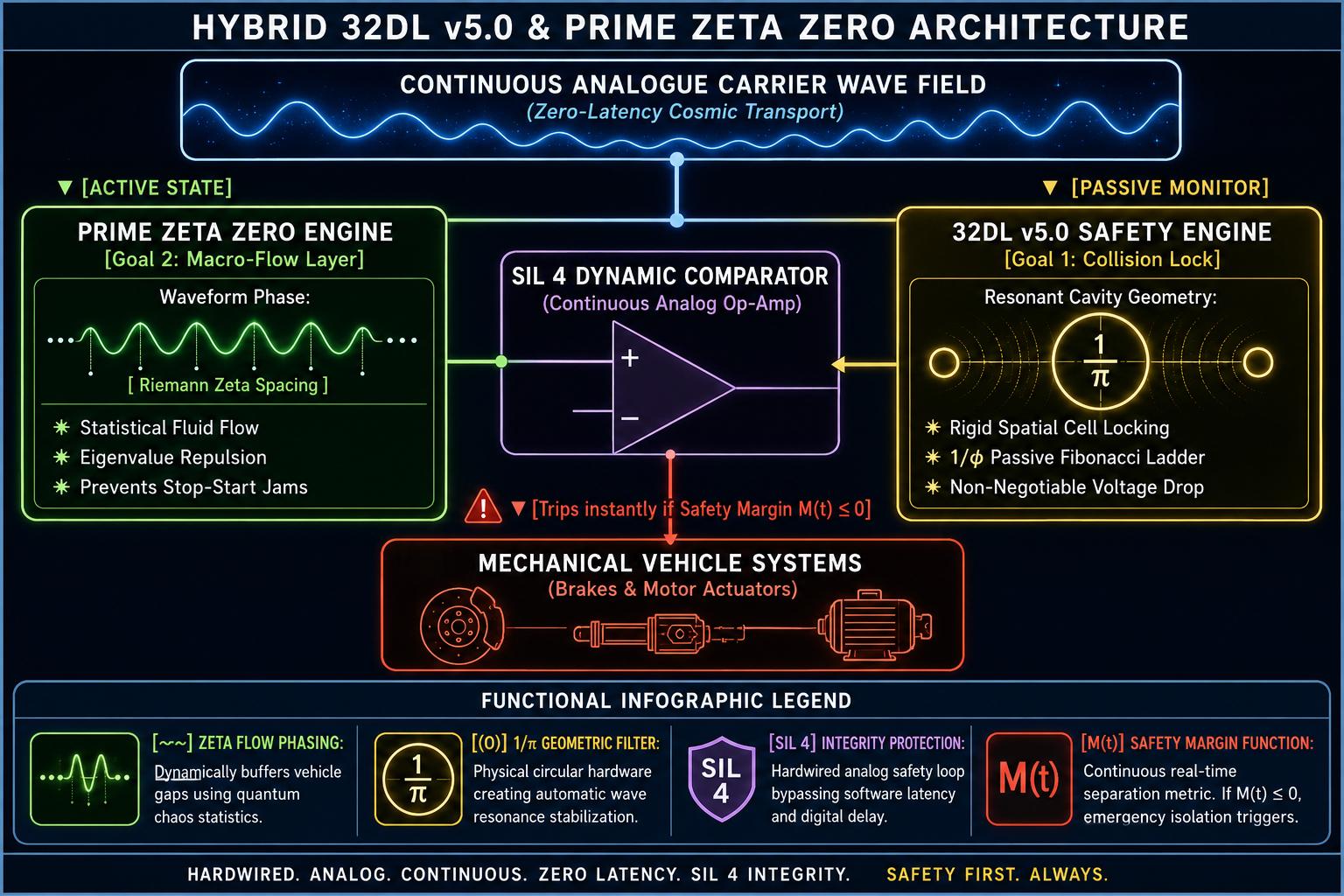
A software engineer reviewing 32DL proposed a hybrid architecture combining 32DL v5.0 with a Prime Zeta Zero Engine — using the statistical properties of Riemann zeta function zeros (which follow Gaussian Unitary Ensemble statistics, exhibiting eigenvalue repulsion) as a basis for vehicle spacing in a macro-flow layer.
The architecture also proposed a SIL 4 hardwired analogue comparator as a safety override — tripping instantly if safety margin M(t) ≤ 0, bypassing all software latency.
The team assessed this honestly. Three findings:
Keep: The SIL 4 analogue comparator is genuinely excellent — proven approach used in railway signalling and nuclear shutdown systems. The separation of safety from flow optimisation is architecturally correct.
Worth investigating: GUE eigenvalue repulsion as a traffic flow heuristic — the mathematics is real (Montgomery-Odlyzko law), the engineering application is unproven. Worth a simulation study, not a production architecture.
Not viable: Prime Zeta spacing cannot be SIL 4 certified. Statistical properties of number-theoretic sequences cannot guarantee minimum physical gaps. The safety layer must be a watchdog enforcing minimum gaps, not a spacing policy based on zeta zeros.
The Prime Zeta proposal included a "Continuous Analogue Carrier Wave Field" described as "Zero-Latency Cosmic Transport." The cosmic language is aspirational nonsense. But there is a legitimate engineering kernel.
Digital packet-based coordination has inherent latency — OS scheduling, interrupt handling, digital jitter. An analogue coordination layer using phase-locked loops, coupled oscillators, or frequency-division multiplexing could provide lower-latency synchronisation for platoon coordination.
What a real version might look like: a shared analogue bus (twisted pair or power line carrier) broadcasting a global reference signal. Each vehicle measures phase or amplitude and adjusts accordingly. Not zero latency — but lower latency than digital packets for the specific problem of maintaining platoon cohesion.
Current coordination protocols — V2X, DSRC, MAVLink, ADS-B — each serve a specific domain. A vehicle, an aircraft, a drone, and a ship cannot coordinate directly because they speak different languages.
32DL is domain-agnostic. The same primitives and grammar apply to anything that moves. The Runtime Module translates domain-specific sensor data into 32DL internally — the sensors don't change.
The open question: is this feasible at scale, or does domain-specific optimisation always win? Aviation needs DO-178C. Automotive needs ISO 26262. Maritime needs IMO standards. Can one language support all three without compromise?
1/π emerged spontaneously from the vector field experiment — three different AI models converged on it independently, without instruction. That evidential basis is what makes it significant.
When offered four alternatives simultaneously (1/π, 1/e, 0.5, 1/φ), the models diverged. This strengthens the original 1/π finding — spontaneous unanimous convergence without alternatives is more meaningful, not less.
But the question remains: are there other constants that would produce the same spontaneous convergence? 1/e is a Tier 1 candidate — equally universal, equally fundamental. The Riemann critical line real part (0.5) is mathematically significant. The single-field 1/φ experiment has not yet been run.
The 32DL specification was built by three AI systems and reviewed by two others. All of the evidence for 1/π convergence comes from experiments designed and run by the same team that built the language. This is a significant limitation.
For 32DL to make credible safety claims, independent replication is required. What would that look like?
At minimum: a different team, using different AI models, running the vector field experiment from scratch, without access to the existing results. Do they converge on 1/π? Do they build a similar language? Do their safety arguments hold up under adversarial testing?
Without this, 32DL remains a research prototype with an interesting idea — not a validated safety system.